
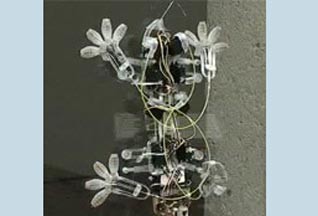
 Марк Каткоски (Mark R. Cutkosky) и его команда из Стэнфорда (Stanford University) построили StickyBot - опытный образец робота-альпиниста, карабкающегося по стенам за счёт четырёх липких ног, передает сайт Мембрана.
Марк Каткоски (Mark R. Cutkosky) и его команда из Стэнфорда (Stanford University) построили StickyBot - опытный образец робота-альпиниста, карабкающегося по стенам за счёт четырёх липких ног, передает сайт Мембрана.
Как объясняют исследователи, StickyBot должен двигаться по вертикальным плоскостям за счёт так называемого "сухого прилипания", причём - управляемого.
Робот старается подражать ящерице-геккону: на его ногах имеются синтетические щетинки, сделанные из эластомера; каждый из этих волосков "привлекается" к стене межмолекулярной силой, известной как сила ван дер Ваальса.
Успехи у группы Каткоски, занимающейся StickyBot с ноября прошлого года, пока скромные - но они есть.
StickyBot пока двигается очень медленно и срывается, но исследователи надеются, что роботы такого типа в будущем смогут служить в качестве планетарных роверов и/или спасательных ботов.









