
Американские ученые из Массачусетского технологического института разрабатывают механические плавники для роботизированных подводных лодок, имитирующие движения плавников рыб.
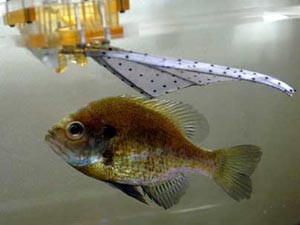
Исследования проводятся под руководством профессора Иэна Хантера. Ученые проанализировали движения грудных плавников синежаберного солнечника (Lepomis macrochirus). Эта небольшая рыбка способна создавать постоянную тягу вперед, чем отличается от многих других обитателей подводных глубин. Исследователи разложили движения плавников солнечника на девятнадцать составляющих с тем, чтобы выяснить какие из них вносят наибольший вклад в создание тяги, сообщает Компьюлента.
Далее на основе полученных результатов специалисты сконструировали тонкий и гибкий механический плавник. Этот плавник изготовлен из токопроводящего материала и изменяет свою форму в зависимости от приложенной разности потенциалов. Благодаря этому создается движущая сила.
По мнению исследователей, миниатюрные субмарины, приводящиеся в движение плавниками, будут более быстрыми и маневренными по сравнению с обычными роботизированными подлодками, оснащенными винтами. В перспективе подводные лодки, имитирующие движения рыб, как ожидается, будут использоваться для сбора информации о состоянии мирового океана, а также с целью поиска и обследования затонувших кораблей. Кроме того, такие субмарины могут быть востребованы военными.
Впрочем, пока работы над механическими плавниками полностью не завершены. Американские ученые намерены выяснить, какой вклад в движение синежаберного солнечника вносят спинной и хвостовой плавники. Это поможет повысить коэффициент полезного действия роботизированных подлодок.









