Корпорации Panasonic и Toyota Motor разработали технологию оценки безопасности роботизированных помощников, которая позволит людям и машинам мирно сосуществовать и сотрудничать.
15 октября 2021 года при участии японской компании Tanac Co. в производство запущен «симулятор человеческого пальца» для оценки безопасности роботизированной техники. Ожидается, что разработка будет пользоваться большим спросом в отраслях с повышенным риском производственных травм.
 Роботы используются в промышленности все чаще, особенно растет популярность «коллаборативных» роботов, призванных повысить производительность и стать рабочими помощниками. При этом важно обеспечить безопасность на производстве, защитив людей с их хрупкими конечностями от травм.
Роботы используются в промышленности все чаще, особенно растет популярность «коллаборативных» роботов, призванных повысить производительность и стать рабочими помощниками. При этом важно обеспечить безопасность на производстве, защитив людей с их хрупкими конечностями от травм.
Объединив технологии Panasonic со знаниями и опытом Toyota в области производственных операций, компании разработали «симулятор человеческого пальца» - как инструмент для прогнозирования возможных травм мягких тканей при работе с роботами, а также для простой проверки и улучшения условий промышленной безопасности.
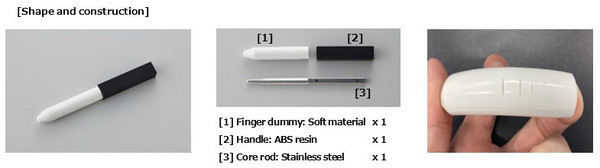
В основе «симулятора пальца» - стержень из нержавеющей стали, который играет роль человеческой кости, покрытый мягким материалом, имитирующим кожу руки. Этот патентованный материал характеризуется точно такой же устойчивостью к разрывам, как настоящая кожа. Соответственно его использование позволяет оценивать риски и визуализировать потенциальные травмы, например, при попадании пальцев между различными деталями машин. Изделие можно использовать многократно, заменяя мягкий материал, для удобства оно оснащено ручкой из АБС-пластика.
Корпорации Panasonic и Toyota начали совместную разработку этой технологии в 2018 году. У Panasonic также есть технология оценки физической безопасности, созданная в ходе экспериментов с использованием кожи свиньи, которая, как утверждается, похожа на кожу человека. С 2005 года компания использует запатентованный инструмент для оценки безопасности своей продукции, такой как «механизм Hasamanize» для предотвращения попадания пальцев в складывающиеся двери и детали автономных транспортных роботов.